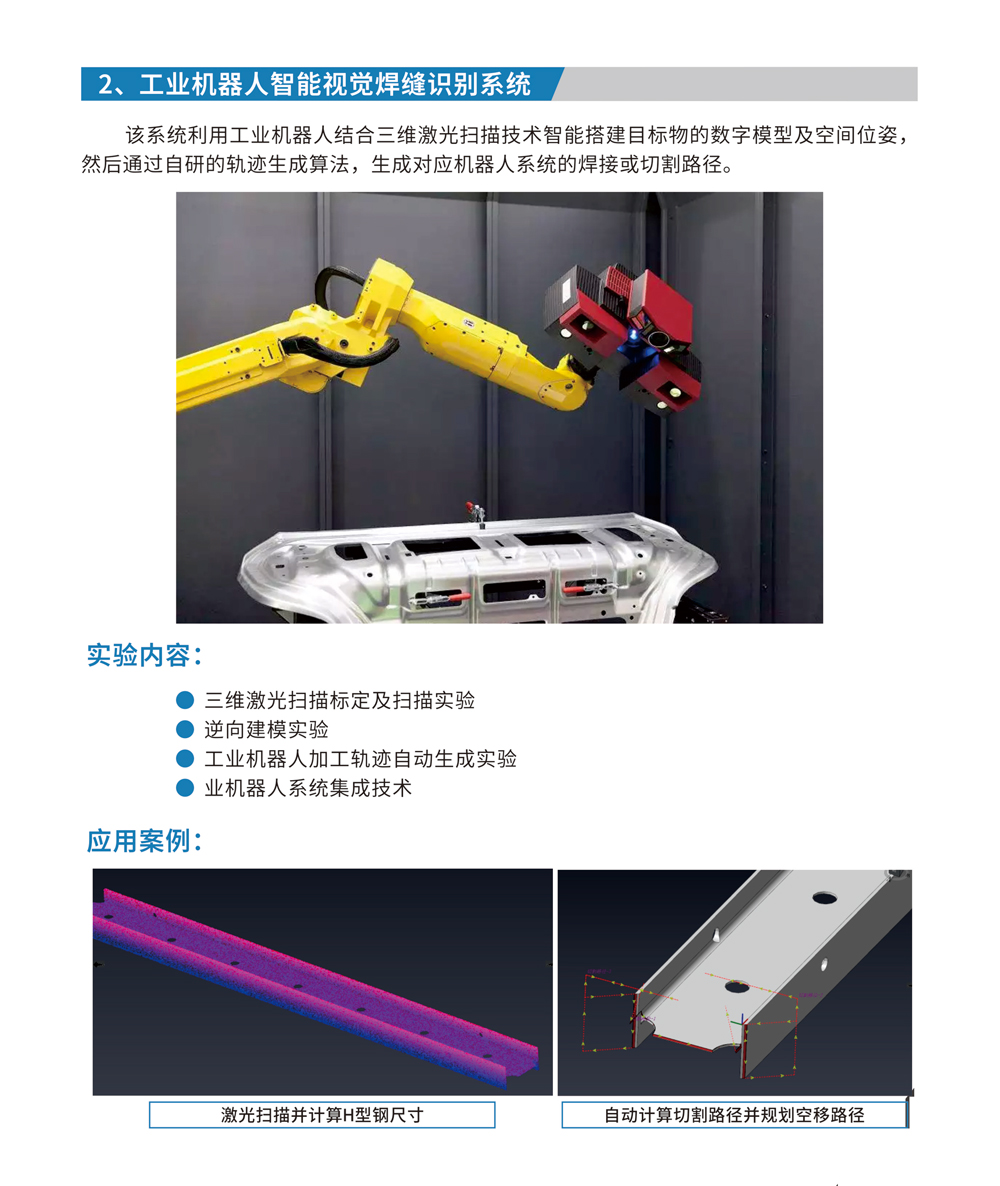
该系统利用工业机器人结合三维激光扫描技术智能搭建目标物的数字模型及空间位姿然后通过自研的轨迹生成算法,生成对应机器人系统的焊接或切割路径。
上一篇: 工业机器人示教编程半实物仿真实训产品
下一篇:工业机器人工作站Back